





Roboter erweitern die menschlichen Fähigkeiten unter gefährlichen Bedingungen durch verringerte Ermüdung sowie erhöhte Präszision und Toleranz.
Während Roboter früher nur stationär in Fabriken eingesetzt wurden, erobern sie heute den alltäglichen Lebensraum der Menschen. Ermöglicht wird dieser Fortschritt durch moderne Hardwareentwicklungen wie Motoren, Gelenke und Sensoren, um die für eine Aufgabe erforderlichen Bewegungen gezielt zu erzeugen.
Damit einhergehend erhöht sich auch der Rechenaufwand, um Roboter mit der erforderlichen Sensorik sowie den autonomen Planungs- und Steuerungsfähigkeiten auszustatten, die sie „auf freier Wildbahn“ benötigen. Fortschrittliche Software, insbesondere auf dem Gebiet der künstlichen Intelligenz (KI) und des maschinellen Lernens, trägt maßgeblich zur Entwicklung der intelligenten Roboter der Zukunft bei. Aber auch Computerplattformen werden künftig eine wichtige Rolle bei der Lösung komplexer Sensorik- und Steuerungsaufgaben spielen.
Im ersten Teil dieses Kapitels werfen wir einen Blick auf die wichtigsten Hardwareanforderungen der meisten Robotikprojekte. Im zweiten Teil befassen wir uns mit dem Aufkommen eingebetteter Systeme, die hochmoderne Robotiklösungen ermöglichen.
Übersicht über Robotik-Hardware

Sensoren
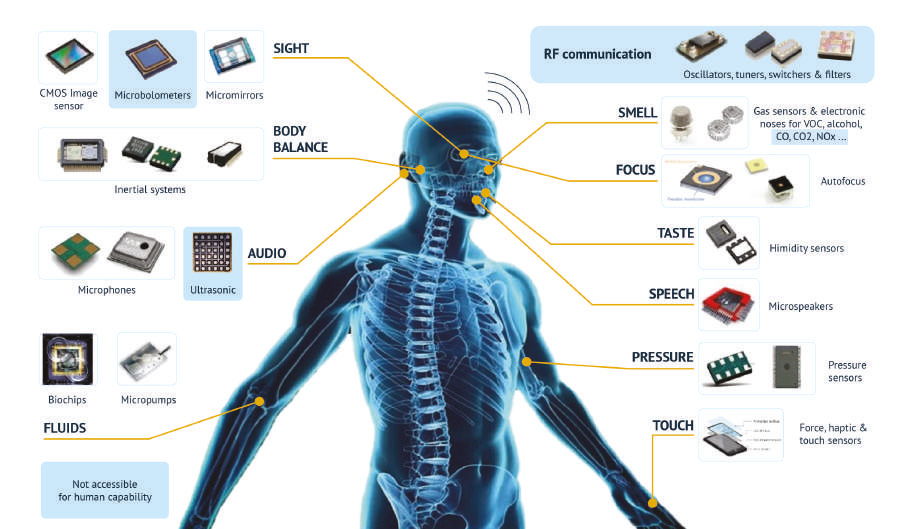
Sensoren dienen Robotern dazu, ihre Umgebung wahrzunehmen. Sie ähneln den menschlichen Sinnen (Sehen, Hören, Riechen, Tasten und Gleichgewicht).
Zu den gängigen Arten von Robotersensoren zählen:
- Kameras zur visuellen Erfassung
der Umgebung - Mikrofone zur Aufnahme von
Geräuschen - Kraftsensoren zum Erkennen von
Gewicht und Widerständen - Näherungssensoren zum Erkennen
von Objekten in einer Umgebung - Gyroskope zur Ermittlung der
Ausrichtung des Roboters - Umgebungssensoren zum Messen
von Luftfeuchtigkeit, Temperatur,
Gasen, Schadstoffen und anderen
Faktoren
Sensoren sind passive Geräte, die den Roboter selbst nicht steuern.
Stattdessen werden die von ihnen erfassten Informationen an eine Zentraleinheit ("Central processing unit", CPU) gesendet und dort in eine Aktion umgesetzt.
Einer der größten Trends bei Robotersensoren ist die zunehmende Verwendung von Ultraschallsensoren. Ein Ultraschallsensor misst die Entfernung eines Zielobjekts, indem er Ultraschallwellen aussendet und den reflektierten Schall in ein elektrisches Signal umwandelt.
Ultraschallsensoren bestehen aus zwei Hauptkomponenten: einen Sender (der mithilfe von piezoelektrischen Kristallen einen Ton ausgibt) sowie einen Empfänger (der das vom Zielobjekt reflektierte Echo erfasst).

Zentraleinheit (CPU)
Die Zentraleinheit bzw. CPU ist die Schnittstelle zwischen den Robotersensoren und dem Steuerungssystem. Sie analysiert, welche Befehle der Roboter ausführen soll, und sendet diese an die jeweiligen Komponenten. In automatisierten Robotern verarbeitet und interpretiert die CPU die von den Sensoren erhaltenen Informationen, führt Berechnungen durch und wendet gegebenenfalls Machine-Learning Algorithmen an. Man könnte sagen, sie ist das Gehirn des Roboters.
Die CPU übernimmt auch die
Fehlerbehandlung. Wenn der Roboter
einen Befehl nicht ausführen kann oder
etwas Unerwartetes in der Umgebung
des Roboters passiert, bestimmt die
CPU, wie der Roboter mit der Situation
umgeht.
Um einen Fehler zu beheben, kann die
CPU beispielsweise:
- den Befehl erneut ausführen;
- Anforderung der manuellen Steuerung
durch den Roboterbediener; - den Fehler als Datenpunkt für maschinelles
Lernen aufzeichnen; - den Roboter deaktivieren.
Bei teilautonomen oder manuell gesteuerten Robotern können die Sensordaten an einen Bediener weitergeleitet werden. Die Befehle des Bedieners werden über die CPU an den Roboter zurückgesendet.
Einige Roboter können mit einem leichteren Single-Board-Computer (SBC) als Middleware ausgestattet sein, der Eingaben verarbeitet und Befehle sendet. Der SBC erfasst die Sensordaten und leitet diese zur Weiterverarbeitung an eine externe CPU weiter. Die CPU sendet anschließend Befehle zurück an den Roboter, die vom SBC analysiert und an die entsprechenden Komponenten übermittelt werden.
Mit dem Aufkommen von künstlicher Intelligenz und Edge Computing verfügen neuere SBCs über KI-freundliche Designs, um die Effizienz zu steigern und mehr Anwendungen zu ermöglichen. Mittels Edge-Computing können Daten dezentral am Netzwerkrand verarbeitet und analysiert werden, um schnelle Echtzeit-Einblicke zu erhalten. Dies erleichtert den Einsatz und die Anpassung von SBC in IoT-basierten Systemen. Einer der wesentlichen Vorteile von SBC ist die flexible Plattformkonfiguration. Das System kann mit minimalen Anforderungen entworfen und dann je nach Anwendung erweitert werden. Zweckbestimmten PC-Systemen fehlt diese Agilität.

Steuerungssystem
Das Steuerungssystem des Roboters sendet Befehle ähnlich dem menschlichen Nervensystem an die zu bewegenden Roboterteile. Das Steuerungssystem des Roboters hängt von dem Grad der Autonomie des Roboters ab.
- Vollständig autonome Roboter verfügen in der Regel über einen geschlossenen Regelkreis, um vorprogrammierte Aufgaben auszuführen. Die CPU bestimmt anhand der Sensordaten die Aktion und erkennt, ob diese ordnungsgemäß ausgeführt wird.
- Bei manuellen Robotern erhält das Steuerungssystem Befehle über eine externe Konsole von einem Bediener. Die CPU leitet die Befehle des Bedieners an den Roboter weiter.
- Bei teilautonomen Robotern ist das Steuerungssystem eine Mischung aus Regel- und Steuersystemen. Abhängig vom Autonomiegrad trifft der Bediener alle wichtigen Entscheidungen über das Steuerungssystem oder der Roboter fordert menschliche Eingaben nur bei Bedarf an.
Die Hardware für das Steuerungssystem des Roboters kann je nach Umgebung, auszuführenden Aufgaben und Herstellungsfähigkeiten stark variieren.
Hier ein paar Beispiele:
- Ein manueller oder teilautonomer Roboter kann mit unterschiedlicher Hardware gesteuert werden, wie etwa einem PC, einem speziell entwickelten Handterminal, einem Headset, Pedalen, einem Mikrofon für Sprachbefehle oder sogar einem textilbasierten Controller, wie etwa einem haptischen VR-Bodysuit.
- Autonome Roboter können vollständig über die integrierte CPU oder durch Software auf einem externen Server gesteuert werden.

Motoren und Stellantriebe
Motoren und Stellantriebe sorgen für die Bewegung des Roboters. Sie ähneln dem menschlichen Muskel- und Herz-Kreislauf System. Ohne sie kann der Roboter keine physischen Aufgaben ausführen.
Dank technologischer Fortschritte werden die Motoren zunehmend kompakter und können in immer mehr Bereichen eingesetzt werden. Die Gehäuse werden häufig im Spritzgussverfahren hergestellt. Zu den jüngsten Entwicklungen im Motorenbau gehören neue Permanentmagnete, die mehr Leistung in kleineren Motoren ermöglichen. Hochauflösende Encoder und Motortuning verbessern die Genauigkeit und die Zykluszeiten. Dies ermöglicht präzisere Robotikanwendungen und verbessert die Wiederholbarkeit und den Durchsatz der Roboter sowie deren Automatisierung. Kleinere Motoren mit verbesserten Verhältnissen zwischen Drehmoment und Gewicht erreichen kurzzeitig höhere Spitzengeschwindigkeiten. Auch die Beschleunigung und Verzögerung erfolgen schneller. Durch die kompakteren Motoren reduziert sich auch die Masse der Roboter, was für erhöhte Steifigkeit und Schwingungsdämpfung sorgt.
Während sowohl Motoren als auch Stellantriebe für die Bewegung des Roboters zuständig sind, dienen sie dennoch unterschiedlichen Zwecken.
- Motoren haben eine Drehbewegung und dienen in der Regel zur kontinuierlichen Leistungsversorgung. Ein Motor kann beispielsweise für die Fortbewegung eines Roboters oder den Betrieb eines internen Lüfters oder eines Bohrers verwendet werden.
- Stellantriebe haben eine lineare Bewegung und werden in der Regel für die präzisere Bedienung genutzt. Mit einem Stellantrieb lässt sich beispielsweise die flexible Beugebewegung eines Roboterellbogens oder die Drehbewegung eines Roboterrumpfs erzeugen. Stellantriebe werden in der Regel elektrisch, hydraulisch oder pneumatisch betrieben.
Der Freiheitsgrad (Degree of Freedom, DOF) ist ein wichtiges Konzept der Roboterbewegung. Gemeint sind damit die Achsen, entlang derer sich ein mechanisches Gelenk bewegen kann. Der DOF eines Robotergelenks wird durch die Hardware, einschließlich der für die Bewegung zuständigen Stellantriebe, begrenzt.

Endeffektoren
Endeffektoren (auch als End-of-Arm-Tooling bzw. EOAT bezeichnet) sind mechanische Baugruppen am Ende eines Roboterarms, mit denen der Roboter physische Objekte handhaben kann.
Endeffektoren sind sozusagen die Hände des Roboters.
- Sie können auf einzelne Aufgaben spezialisiert sein, wie etwa den Einsatz bestimmter Werkzeuge. Diese Endeffektoren lassen sich extrem vielseitig bestücken, etwa mit Bohrern, Schleifgeräten, Hochdruckreinigern, Saugnäpfen oder Werkzeug für wissenschaftliche Untersuchungen.
- Greiferartige Endeffektoren hingegen können für allgemeinere Aufgaben genutzt werden und unterschiedliche Objekte greifen und halten. Greifer können viele Formen haben, wie etwa durch Stellantriebe gesteuerte Klemmen, elektromagnetische Halterungen oder statische Vorrichtungen wie Haken oder speziell entwickelte Befestigungselemente.
Einige Roboter kombinieren beide Arten von Endeffektoren. Ein zum Schweißen von Rohren eingesetzter Roboter kann beispielsweise einen Werkzeugarm mit einem Schweißbrenner und einen Greiferarm haben, der das zu verschweißende Rohrende in Position hält.
Durch austauschbare Endeffektorsysteme kann der Bediener das beste Werkzeug oder den passenden Greifer für eine Aufgabe wählen. Auch Greifer können zum Teil Werkzeug halten und bedienen, lassen sich manuell oft jedoch weniger genau steuern als werkzeugspezifische Endeffektoren.
Die Softrobotik erweitert die Vielseitigkeit der Endeffektoren, indem starre Komponenten durch weichere und flexiblere Endeffektoren ersetzt werden. Ziel der Softrobotik ist, biologische Eigenschaften nachzuahmen, um empfindliche oder nachgiebige Objekte handhaben zu können. Flexiblere Roboteroberflächen können auch die Sicherheit der Bediener erhöhen.

Steckverbinder
Steckverbinder dienen in der Robotik dazu, Befehle und Leistung im Roboter weiterzuleiten. Für den Betrieb von Motoren, Stellantrieben, Sensoren und Endeffektoren sind Datenbusse und elektrische Schaltkreise erforderlich.
In der Robotik kommen unter anderem die folgenden Arten von Steckverbindern zum Einsatz:
- Robuste Steckverbinder: Sie dienen zur Daten- und Leistungsübertragung und sind beispielsweise Rundstecker, Push-Pull-Stecker sowie Mikro-D-Steckverbinder. Sie werden von Hand verbunden, verhindern jedoch ein versehentliches Trennen. Rundstecker können äußerst kompakt sein und eignen sich daher hervorragend für kleinere bewegliche Teile an Endeffektoren und Robotergelenken.
- Netzwerkstecker Diese Steckverbinder dienen der Datenübertragung. Sie ermöglichen eine schnellere Verbindung als herkömmliche Universalstecker. RJ45-Stecker sind handelsübliche Ethernet-Anschlüsse, die in unterschiedlichen flexiblen Gehäusen in der Industrierobotik eingesetzt werden.
- Drahtlose Datenverbindungen
Mobile Roboter benötigen drahtlose Stecker, damit Sensordaten und Befehle über eine WLAN- oder Funkverbindung übertragen werden können. Sie werden auch in stationären Industrierobotern eingesetzt, die mit einem zentralen Server verbunden sind.
In der Robotik werden heute unterschiedlichste Arten von Steckverbindern verwendet. Handelsübliche Stecker sind in Gehäusen erhältlich, die rauen Umgebungen standhalten und dennoch ausreichend flexibel sind, um Roboterbewegungen durchzuführen. Steckverbinder können sowohl das Design und die Konstruktion von Endeffektoren und Robotergliedern als auch die Geschwindigkeit der Datenübertragung beeinflussen.
Stromversorgung von Robotern
Die Stromversorgung stellt insbesondere bei mobilen Robotern eine fertigungstechnische Herausforderung dar. Stationäre Roboter können direkt an eine industrielle Stromquelle angeschlossen werden, während mobile Roboter in der Regel mit wiederaufladbaren Lithium-Ionen-Batterien betrieben werden. Abhängig von der benötigten Wattleistung, Mobilität, Ladequelle, Gewichtsbeschränkungen und Umgebungsfaktoren müssen die Batterien mitunter speziell entwickelt und gefertigt werden.
Die Ladequelle spielt bei batteriebetriebenen Robotern eine wichtige Rolle. Möglicherweise muss ein eigenes Ladegerät passend zu den Leistungsanforderungen, den Einschränkungen der Stromquelle sowie den Umgebungsfaktoren entwickelt werden. Das Ladegerät kann direkt am Roboter montiert oder ein eigenständiges Gerät sein.
Beispiele für Stromquellen:
- Herkömmlicher Industriestrom: Dieser wird vom städtischen Kraftwerk eingespeist. Bei mobilen Robotern ist in der Regel nicht der Roboter an sich, sondern dessen Ladegerät an die Stromversorgung angeschlossen.
- Solarmodule: Diese werden entweder direkt am Roboter oder an einer separaten Ladestation montiert. Der Roboter kann auch mit Solarzellen ausgestattet werden, um ihn während des Fernbetriebs mit Strom zu versorgen.
- Tragbare Generatoren: Diese werden oft mit Benzin, Propan oder Biodiesel betrieben. Fortschritte in der Generatortechnologie verbessern die Tragbarkeit und Kraftstoffeffizienz von Generatoren und erweitern die Möglichkeiten für Kraftstoffquellen.
Eine weitere Möglichkeit, batteriebetriebene Roboter mit Energie zu versorgen, besteht darin, die Batterien während des Betriebs auszutauschen. Ein Roboter mit Hot-Swapping-Fähigkeit wird mit mehreren Batterien betrieben. Wenn eine Batterie entladen ist, kann sie während des Betriebs des Roboters ausgetauscht werden
Die leere Batterie wird anschließend zur Wiederverwendung aufgeladen.
Herausforderungen bei der Roboter-Hardware
Ressourcenmangel
Weltweite Engpässe bei Computerchips und handelsüblicher Hardware beeinflussen die Roboterfertigung maßgeblich. Sie liegen außerhalb der Kontrolle von Roboterherstellern und können zu Designkompromissen, erhöhten Kosten, Terminüberschreitungen und ungenauen Prognosen führen.
Umweltbedingungen
Die Betriebsumgebung eines Roboters muss bei jeder Hardwarekomponente berücksichtigt werden. Roboter werden in gefährlichen Umgebungen eingesetzt und müssen Witterungsbedingungen, Staub, Druck oder dem Eintauchen in Wasser standhalten. Aufgrund der erforderlichen Schutzart und chemischen Verträglichkeit kann nur bestimmte Hardware verwendet werden. Kundenspezifische Gehäuse für die Roboterhardware können diesen Einschränkungen entgegenwirken, aber auch zu weiteren Herausforderungen bei der Herstellung führen. Auch die Software kann zur Meidung von Gefahren beitragen. Autonome Systeme können beispielsweise so programmiert werden, dass der Roboter Gefahren erkennen und intelligent umgehen kann.
Steigenden Rechenleistung
Im Gegensatz zu kontrollierten Umgebungen benötigen Roboter in unkontrollierten Umgebungen eine deutlich höhere Rechenleistung. Neben moderner Software sind auch Rechenplattformen notwendig, mit denen sich komplexe Sensor- und Steuerungsaufgaben schnell und effektiv berechnen und lösen lassen.
Wichtige Fortschritte in diesem Bereich sind:
Offene Forschungs- und Entwicklungsplattformen
Offene Plattformen für die Erforschung und Entwicklung von Roboterhardware, -software, Rechenplattformen und Simulationen werden von einer großen wissenschaftlichen Community unterstützt. Sie ermöglichen Vergleiche zwischen verschiedenen Methoden und ermöglichen Forschern, sich auf die Algorithmik zu fokussieren. Standardisierung ist wichtig, um die Entwicklung durch den effizienten Austausch von Algorithmen, Hardware- und Softwarekomponenten zu beschleunigen.
Neuromorphe Computerhardware
Neuromorphes Computing ist eine Methode der Computertechnik, bei der Elemente eines Computers Systemen im menschlichen Gehirn und Nervensystem nachgebildet werden. Die dafür verwendeten Computerarchitekturen spiegeln die Morphologie neuronaler Netze wider: Spezielle Verarbeitungseinheiten emulieren das Verhalten von Neuronen direkt in der Hardware, und ein Netz physikalischer Verbindungen (Bussysteme) erleichtert den schnellen Informationsaustausch.
Es wird erwartet, dass neuromorphe Computerhardware ihren Platz unter anderen Plattformen wie Zentraleinheiten (CPUs), Grafikverarbeitungseinheiten (GPUs) und feldprogrammierbaren Gate-Arrays (FPGAs) einnehmen wird. Neuromorphe Hardwaresysteme sind aufgrund ihrer Modularität und Flexibilität vielversprechende Robotiklösungen. Ihr hohes Maß an Parallelität und die asynchrone ereignisbasierte Implementierung führen dazu, dass mehrere Berechnungen schnell, gleichzeitig und automatisch durchgeführt werden können. Neuromorphe Systeme beinhalten das Lernen in der Hardware und kombinieren die Verarbeitung und Speicherung von Daten im Gegensatz zu herkömmlichen Systemen, bei denen diese Funktionen von separaten Komponenten ausgeführt werden. Diese Art des maschinellen Lernens wird durch Software-Algorithmen unterstützt, die auf synaptischer Plastizität und neuronaler Anpassung basieren.[13]
Computergestützte Lösungen nach dem Vorbild von Insektengehirnen
Unbemannte Luftfahrzeuge (Unmanned Aerial Vehicles, UAVs) erfordern besonders kompakte Robotiksysteme, da sie leicht, schnell und energieeffizient sein müssen. Manche rechnerische Lösungen für UAVs, wie etwa die Hindernisvermeidung, Zielpeilung, Höhenregelung und Landung, sind inspiriert von Insektengehirnen. Elegante Robotiklösungen sind an die Biologie von Insekten angelehnt, wie etwa den Körperbau, die enge sensomotorische Koordination, das Schwarmverhalten sowie die sparsame Ressourcennutzung der kleinen Tiere. In UAVs werden diese Eigenschaften mit Algorithmen und multifunktionalen Schaltkreisen umgesetzt.
Eine wichtige Erkenntnis aus diesen Lösungen ist, dass die enge Integration von Algorithmen und Hardware zu extrem kompakten, leistungsstarken und effizienten Systemen führt. Diese biologisch inspirierten Algorithmen können unterstützt werden von unterschiedlichsten Hardwareplattformen, von Mikrocontrollern bis hin zu neuromorphen Chips. Besondere Aufmerksamkeit sollte der Schnittstelle zwischen Computer- und Antriebshardware geschenkt werden. [12]
Künstliche Haut: Kombination aus Sensoren und Materialien
Ein neuer Bereich der Robotik ist künstliche oder intelligente Haut. Dabei wird die Sensorhardware des Roboters in dessen Hülle integriert. Während dieser Forschungsbereich vielfältige Anwendungsmöglichkeiten bietet, wird derzeit allem voran an der Entwicklung intelligenter Haut gearbeitet, die eine engere Interaktion zwischen Roboter und Mensch ermöglicht. Ziel ist die Erkennung unerwarteter physischer Interaktionen. Hierfür soll Computing-Fabric direkt in den Sensor integriert werden. [13]
Zusammenfassung
Roboter werden vielseitig eingesetzt, um die menschlichen Fähigkeiten zu erweitern. Die Anforderungen an die Roboterhardware variieren abhängig von den Aufgaben, für die ein Roboter gebaut wurde. In der Regel sind Roboter mit Sensoren, einer CPU, Motoren, Stellantrieben, Endeffektoren und Steckverbindungen ausgestattet. Alle diese Komponenten sind sowohl einzeln als auch als Teil eines Systems zu betrachten.
Neben den Aufgaben, die ein Roboter ausführen kann, müssen die Hersteller von Roboterhardware weitere Herausforderungen bewältigen. 11.
Ressourcenengpässe können Designänderungen und Fertigungsverzögerungen zur Folge haben. Bestimmte Umgebungsbedingungen schränken den Material- und Komponenteneinsatz bei Robotern ein und erfordern möglicherweise softwarebasierte Lösungen.
Zu den jüngsten Innovationen in der Robotertechnologie gehören erhöhte Rechenleistungen, fortschrittliche Softwarelösungen sowie die Entwicklung von Biomimikry. Hierzu zählen beispielsweise Software, die Insektengehirnen nachempfunden ist, intelligente Haut, neuromorphes Computing und andere neue Technologien. Diese Innovationen erweitern die Fähigkeiten von Robotern und bringen den Bereich der Robotik-Hardware voran.
-
Gabriel Aguiar Nour, State of the Art Robotics, Ubuntu Blog, May and June 2022 edition
-
Sven Parusel, Sami Haddadin, Alin Albu-Schaffer, Modular state-based behaviour control for safe human-robot interaction: A lightweight control architecture for a lightweight robot, IEEE International Conference on Robotics and Automation, 2011.
-
Mathanraj Sharma, Introduction to Robotic Control Systems, Medium Newsletter, Sept 2020.
-
Ravi Teja, Blog on Raspberry Pi vs Arduino, www.electronicshub.org, April 2021.
-
Mats Tage Axelsson, Top 5 Advanced Robotics Kits, www.linuxhint.com, September 2022.
-
Techopedia contributor, Actuator, www.techopedia.com, Jan 2022.
-
Tiffany Yeung, What Is Edge AI and How Does It Work?, https://blogs.nvidia.com/blog/ 2022/02/17/what-is-edge-ai/, Feb 2022.
-
NT Desk, The state has the potential to grow as an electronic manufacturing centre, www.navhindtimes.in, Oct 2019.
-
Dr Matthew Dyson, Printed Electronics: Emerging Applications Accelerate Towards Adoption, IDTechEx, Nov 2021.
-
Advanced network professionals blog, www.getanp.com/blog/35/hardwa re-your-business-needs-to-succee d.php, Dec 2019.
-
Advanced Mobile Group, The Latest Technology and Supply Chain Trends in Robotics for 2022 and Beyond. https://www.advancedmobilegrou p.com/blog/the-latest-technology -and-supply-chain-trends-in-robot ics-for-2022-and-beyond, Oct 2022.
-
Moncourtois, Alyce. Can Insects Provide the "Know-How" for Advanced Artificial Intelligence? AeroVironment https://www.avinc.com/resources/av-in-the-news/view/microbrain-case-study 2019.
-
Yirka, Bob. Biomimetic elastomeric robot skin has tactile sensing abilities. Tech Xplore. https://techxplore.com/news/2022-06-biomimetic-elastomeric-robot-skin-tactile.html June 2022.

Bericht zur Fertigungsrobotik
Ein Leitfaden für Ingenieure zum Verständnis des aktuellen Stands der Technik bei Hardware, Materialien und der Zukunft der Roboterfertigung.
eBook herunterladen

