





Neue Dimensionen bei Robotikmaterialien
Der Bereich der Robotik hat in den letzten Jahren bemerkenswerte Fortschritte gemacht und stellt herkömmliche Vorstellungen von Roboterarchitektur und -funktion in Frage. In einem 2018 im wissenschaftlichen Magazin Science Robotic veröffentlichten Artikel erläuterte eine Expertengruppe mit Wissenschaftlern die zukünftigen Herausforderungen im Bereich der Roboterentwicklung und -fertigung. Als größte Herausforderung nannten sie bezeichnenderweise die Entwicklung neuer Robotikmaterialien.[1]
Zu den weiteren Herausforderungen, die mit der Materialwissenschaft zusammenhängen, gehört die Entwicklung von biohybriden und bioinspirierten Robotern, die sich von lebenden Organismen inspirieren lassen, um multifunktionale und autonome Systeme zu schaffen. Auch die Anpassungsfähigkeit von Robotern an extreme und komplexe Umgebungen basiert auf den mechanischen und selbstheilenden Eigenschaften innovativer Robotikmaterialien.
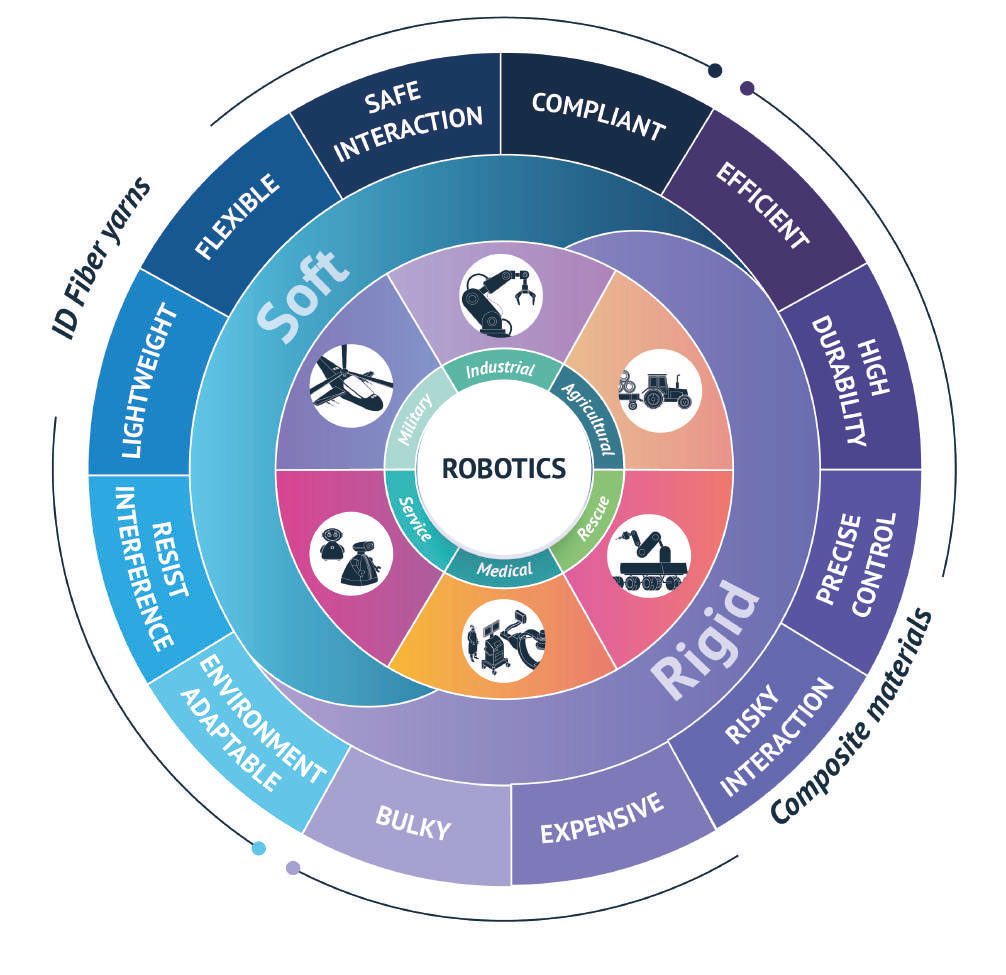
Um diesen sich schnell entwickelnden Bereich zu verstehen, muss zwischen konventioneller Robotik und Softrobotik unterschieden werden.
Das Design konventioneller Roboter basiert auf mechatronischen Systemen. Angetrieben werden diese Roboter in der Regel von elektromechanischen Motoren. Die individuellen Komponenten und Materialien, aus denen diese Roboter zusammengesetzt sind, erfüllen jeweils eine separate Funktion (Antrieb, Sensorik, Struktur). Die traditionelle Robotik basiert auf starren Materialien wie Stahl, Aluminium, Hartplastik, Legierungen und Verbundwerkstoffen.
Das Ziel der Softrobotik ist hingegen, unterschiedliche Funktionen, wie etwa die Betätigung, Sensorik, Anpassung und Fortbewegung, in ein einziges Material zu integrieren. Zu diesem Zweck werden intelligente und multifunktionale Materialien wie Elastomere, Gele, Gewebe und biologische Materialien eingesetzt, womit sich der Roboterkörper an seine Umgebung anpassen kann.[3]

Konventionelle Robotikmaterialien
In der Industrie eingesetzte Roboter bestehen überwiegend aus Stahl, Aluminium, Gusseisen und Hartplastik. Die Materialwissenschaft hat durch die Entwicklung von Materialien, die diese Roboter stärker, leichter, steifer und präziser machen, wesentlich zu deren Erfolg beigetragen. Diese Art von Roboter werden jedoch selten außerhalb von Fabriken eingesetzt, da ihnen die für alltägliche Umgebungen erforderliche Agilität und Anpassungsfähigkeit fehlt.
Zu den neueren Materialien, die zunehmend für konventionelle Roboter verwendet werden, gehören kohlefaserverstärkte Verbundstoffe. Sie können erheblich dazu beitragen, den Energieverbrauch, die Leistung und die Sicherheit der Roboter zu verbessern. Dass kohlefaserbasierte Verbundstoffe erheblich leichter und langlebiger als Metall sind, macht sie zu vielversprechenden Alternativen für die Zukunft der Robotik. Die Herstellungskosten sind jedoch noch immer hoch und die Massenproduktion bleibt eine Herausforderung.[4]
Formgedächtnislegierungen (FGL), wie die Nickel-Zinn-Legierung Nitinol, können so "programmiert" werden, dass sie bei Erwärmung eine bestimmte Form annehmen. Obwohl ihre Einsatzmöglichkeiten noch begrenzt sind, könnten FGL nach und nach schwere Hydraulikantriebe in Robotern ersetzen und gleichzeitig die Lebensdauer erhöhen. Komponenten aus Nitinol werden bereits für Roboter in Raumfahrtanwendungen eingesetzt. Die Reifen des Marsrovers Curiosity der NASA bestehen vollständig aus dem Memorymetall Nitinol.
Robotikmaterialien der neuen Generation
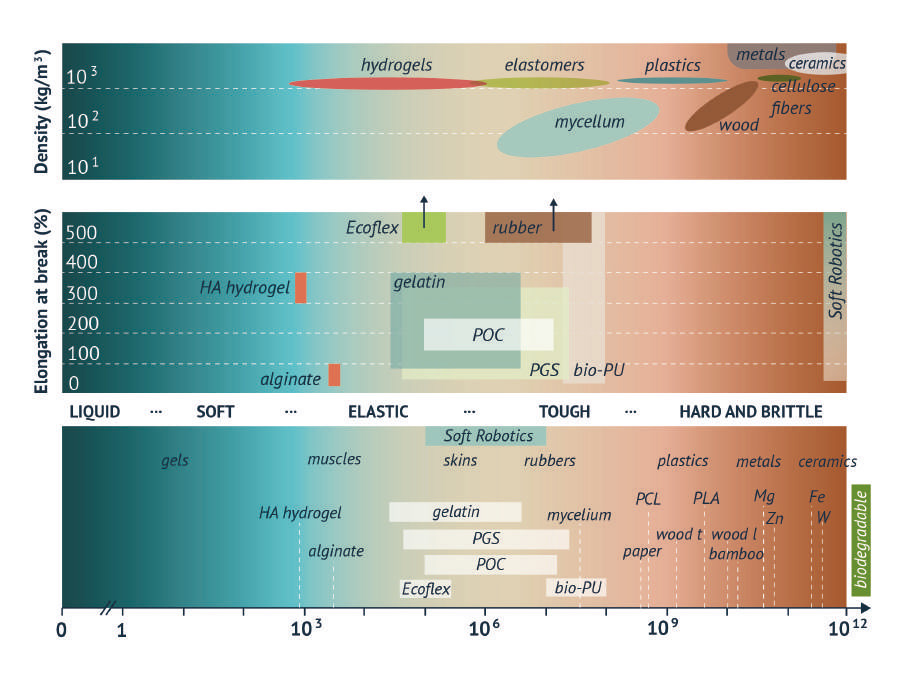
Im Gegensatz zur konventionellen Robotik setzt die Softrobotik auf eine neue Generation verformbarer, flexibler und intelligenter Materialien. Zu den Hauptmaterialien der Softrobotik gehören Elastomere, wie natürliche und synthetische Kautschukarten, Silikone (z. B. Polydimethylsiloxan bzw. PDMS) sowie weiche Verbundstoffe.
Elastomere sind mechanisch nachgiebig und extrem elastisch, wodurch sie ihre ursprüngliche Form selbst nach einer deutlichen Deformation wiedererlangen können.[5]
Der erste vollständig autonome Softroboter wurde 2016 entwickelt. Sein Körper basiert auf Elastomeren.[7]

Der „Octobot“, dessen Name an seine oktopusartige Form angelehnt ist, wird durch mikrofluidische Logik gesteuert. Die Armbewegung erfolgt mittels Wasserstoffperoxid, das durch die Reaktion mit Platinpartikeln Gas freisetzt. Ausgelöst wird die Bewegung über ein eingebettetes pneumatisches Netzwerk (EPN). Dieses nutzt die Fähigkeit von Elastomeren, sich bei Freisetzung von Gas auszudehnen.
Der wesentliche Vorteil von Elastomeren gegenüber starren Materialien ist die Möglichkeit, Roboterbewegungen auf engstem Raum auszuführen und Stoßbelastungen effektiver auf den gesamten Roboterkörper zu verteilen.
Auch intelligente Materialien gewinnen in der Robotik rasch an Bedeutung. Diese von Natur aus multifunktionalen Materialien vereinen Sensorik, Antrieb und Struktur in einer einzigen Komponente. Intelligente Materialien können ihre Form als Reaktion auf verschiedene Reize wie elektrische Felder, Temperatur, Licht und pH-Wert verändern.[3]
Elektroaktive Polymere (EAP) etwa lassen sich durch das Anlegen von elektrischer Spannung verformen und werden daher oft als „künstliche Muskeln“ bezeichnet. Als Schicht zwischen zwei Elektroden werden EAP in der Softrobotik als Stellantrieb verwendet.[8] Formgedächtnispolymere hingegen werden so programmiert, dass sie bei Erwärmung eine bestimmte Form einnehmen. Dies hat bereits zu interessanten Anwendungen in der Luft- und Raumfahrt sowie in der Biomedizin geführt.[3]
Herstellung von Softrobotern
Im Vergleich zu konventionellen Robotern steckt die Herstellung von Softrobotern im großen Maßstab noch in den Kinderschuhen. In den letzten Jahren haben sich jedoch neue Fertigungsmöglichkeiten ergeben. Da Softroboter überwiegend aus Polymeren gefertigt werden, kommen dafür im Grunde zwei Produktionsansätze infrage: Spritzguss und additive Fertigung.
Spritzguss wird in der Regel für Softroboter mit einfacheren Strukturen verwendet. Bei Silikonen und anderen durch katalytische Polymerisation hergestellten Materialien kommt es durch das Mischen von zwei Komponenten zu einer Vernetzungsreaktion. Daher ist es vor dem Härten der Polymermischung wichtig, diese zu entgasen, um Defekte im Endprodukt zu vermeiden. Teile, deren Innenstrukturen für das herkömmliche Spritzgussverfahren zu komplex sind, lassen sich mitunter durch Tauchbeschichten und im Rotationsgussverfahren anfertigen.[9]
Additive Fertigung bzw. 3D-Druck ist die einfachste Art zur Herstellung hochkomplexer Komponenten. Hierbei wird das Material Schicht für Schicht aufgetragen, um dreidimensionale Gegenstände zu erzeugen. Ursprünglich war der 3D-Druck lediglich für harte, thermoplastische Polymere gedacht. Mittlerweile kommen dafür aber auch weiche Materialien wie Elastomere und Hydrogele zum Einsatz, wodurch die additive Fertigung zu einem der vielversprechendsten Herstellungsansätze für Softroboter wird. Auch die ersten intelligenten Materialien werden bereits für additive Fertigungstechniken – den „4D-Druck“ – verwendet.[10] 4D-gedruckte Teile nehmen unter bestimmten Umgebungsbedingungen eine vorprogrammierte Form an.
Nachhaltigkeit von Robotikmaterialien
Der Umgang mit Elektronikschrott ist eines der drängendsten Themen des 21. Jahrhunderts.
Schätzungen zufolge werden täglich mehr als 100.000 Tonnen elektronische Geräte entsorgt, von denen nur ein äußerst geringer Teil recycelt wird. Unterhaltungselektronik landet aufgrund ihrer komplexen Zusammensetzung, die häufig seltene oder giftige Materialien enthält, in der Regel auf Deponien.[6]
Wirklich innovative Robotikmaterialien müssen daher für die Kreislaufwirtschaft geeignet sein, was neue und nachhaltigere Technologien erfordert. Im Vergleich zur traditionellen Robotik bietet die Softrobotik der Industrie die Möglichkeit, ihre Umweltauswirkungen erheblich zu verringern. Da für Softroboter häufig multifunktionale Materialien genutzt werden, können sie eine einfachere Architektur haben, denn ein und dasselbe Material erfüllt oft mehrere Zwecke (z. B. Betätigung und Struktur). Dadurch sind sie leichter zu recyceln.
Ferner können in der Softrobotik auch biokompatible und biologisch abbaubare Materialien verwendet werden. Die Palette reicht unter anderem von natürlichen Polymeren, wie Kollagen, Zellulose und Chitosan bis hin zu synthetischen Polymeren, wie Polycaprolacton (PCL) und Polyactide (PLA).[11]
Der Einsatz selbstheilender Materialien kann schließlich dazu beitragen, die Lebensdauer von Softrobotern deutlich zu verlängern. Wie der Name bereits sagt, können sich selbstheilende Materialien nach einem Schaden (bedingt) selbst reparieren.[12]
Zukunftsorientierte Entwicklung: Zweck der Lebenszyklusanalyse
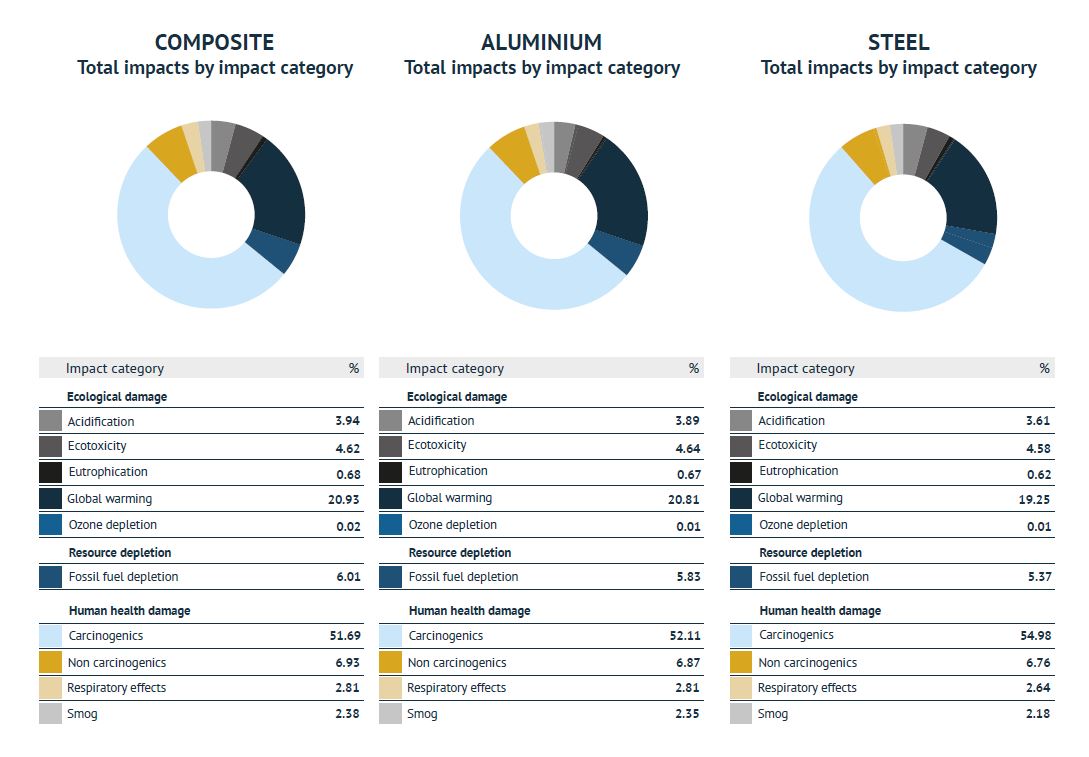
Anhand einer Lebenszyklusanalyse (Life Cycle Analysis, LCA) lassen sich die Umweltauswirkungen von Produkten oder Dienstleistungen über den gesamten Lebenszyklus hinweg – von der Rohstoffgewinnung bis zur Entsorgung – bewerten. Mit Hilfe der LCA können die Entwickler die Auswirkungen ihrer Robotikprodukte ermitteln und diese für die Kunden transparent darstellen. Die Analyse birgt gewisse Herausforderungen:
Datenverfügbarkeit:
LCAs erfordern große Datenmengen, etwa zu den Materialien und der Energie, die für die Produktion, den Transport, die Nutzung und die Entsorgung aufgewendet werden. Insbesondere für Produkte, die in Kleinserien oder für Nischenmärkte wie die Robotik hergestellt werden, sind diese Daten oft nicht leicht zu beschaffen.
Komplexität:
Eine Lebenszyklusanalyse kann ein komplexer Prozess sein, der viele verschiedene Phasen und Auswirkungen umfasst. Die Umweltauswirkungen unterschiedlicher Produkte oder Dienstleistungen zu vergleichen, ist mitunter schwierig – speziell bei komplett neuen Produkten und Märkten.
Unsicherheit:
Bei den für LCAs verwendeten Daten schwingt oft ein gewisses Maß an Unsicherheit mit. Es lassen sich häufig keine definitiven Aussagen hinsichtlich der Umweltauswirkungen von Produkten und Dienstleistungen treffen. Da es sich bei der Robotik um einen sehr jungen Industriezweig handelt, liegen noch keine verlässlichen Langzeitdaten vor.
Relevanz:
Lebenszyklusanalysen bewerten häufig die Umweltauswirkungen von Produkten oder Dienstleistungen in einem bestimmten Kontext, z. B. einer bestimmten geografischen Region. Eine Verallgemeinerung der Ergebnisse auf andere Regionen oder Kontexte kann dadurch erschwert werden.
Um diesen Herausforderungen zu entgegnen, hat Protolabs zusammen mit führenden Entwicklern und Ingenieuren auf dem Design for Planet Festival des Design Council in Norwich, Großbritiannien, fünf Tipps für effektive Ökobilanzen in der Produktentwicklung erarbeitet.
1. Berücksichtigung der Umwelt bei der Entwicklung von Produkten
Für eine effektive Ökobilanz ist die Berücksichtigung der Auswirkungen des Produkts auf den Planeten und seine Bewohner wichtig. Welche Auswirkungen sind von Bedeutung und wie lassen sich diese messen?
2. Sorgfältige Materialauswahl und Optimierung des Materialeinsatzes für Produkt und Verpackung
Bei der Produktion ist zu überlegen, wie der Materialeinsatz optimiert und nicht maximiert werden kann. Durch die Nutzung von Designmethoden wie dem generativen Design lassen sich mitunter die Stabilität, Leichtigkeit und Ästhetik von Produkten verbessern.
3. Ermittlung der Ursachen für hohe Abfall- und Energieaufkommen
Je besser Sie Ihre eigenen Prozesse und die zu messenden Faktoren verstehen, desto leichter können Sie ermitteln, wo ein hoher Verschwendungsgrad – sowohl an Rohstoffen als auch Energie – herrscht und entsprechende ressourcenschonende Maßnahmen ergreifen, d.h. eliminieren, reduzieren, recyceln und wiederverwenden. Fertigungspartner mit transparenten Energie- und Materialdaten erleichtern die LCA.
4. Berücksichtigung von Lebensende und Demontage bei der Entwicklung
Beachten Sie die Design for Planet-Prinzipien der Kreislaufwirtschaft und Regeneration. Die Entsorgung alter Produkte wirkt sich auf die Umwelt aus. Es gilt daher, bereits bei der Entwicklung zu überlegen, wie diese am Ende ihrer Lebensdauer demontiert, recycelt und wiederverwendet werden können, damit sie nicht auf der Deponie landen. Möglichkeiten zum Austausch von Teilen zur Verlängerung der ursprünglichen Lebensdauer sollten ebenfalls berücksichtigt werden. Wichtig ist auch, ob sich natürliche Ressourcen durch ein Produkt oder eine Dienstleistung sogar regenerieren lassen.
5. Kollektives Lernen durch den Austausch bewährter Praktiken
Man braucht ein Open-Source-Modell – sprich ein für jedermann zugängliches Modell – das demonstriert, was sich bewährt hat und gut funktioniert. Dies ermöglicht uns, aus Fehlern und Erfahrungen zu lernen. Entwickler müssen experimentieren, Verschiedenes ausprobieren und aus der kollektiven Erfahrung lernen können. Überlegen Sie, wie Sie Ihre eigenen Erfahrungen mit anderen Designern teilen können, damit wir alle zu nachhaltigeren Produkten gelangen.

Anwendungsbereiche für Softrobotik
Die erwartete durchschnittliche jährliche Wachstumsrate (DJWR) für die Softrobotik Industrie zwischen 2022 und 2027 liegt bei 35,1 %, wobei Nordamerika der größte Markt ist.
Dies zeugt vom zunehmenden Interesse an Softrobotik-Lösungen in verschiedenen Bereichen. Bei medizinischen und chirurgischen Anwendungen wird das stärkste Wachstum vorhergesagt. [13]
In der Biomedizin eröffnet die Soft-Robotik beispiellose Möglichkeiten, um intelligente Gliedmaßen zu einem Bruchteil der Kosten konventioneller Prothesen zu entwickeln. Kürzlich wurde beispielsweise eine Softrobotik-Hand aus Elastomeren entwickelt (siehe rechtes Bild). Sie wird pneumatisch gesteuert, um Patienten in Echtzeit ein taktiles Feedback zu geben.[14]
Die Softrobotik könnte auch zu Fortschritten in der minimalinvasiven Chirurgie beitragen, indem sie schnellere und sicherere Eingriffe ermöglicht, bei denen das umliegende Gewebe intakt bleibt.
Ein weiteres vielversprechendes Feld für die Softrobotik ist die Entwicklung weicher Greifer zur Handhabung empfindlicher Objekte.
Diese neue Generation vielseitiger Robotergreifer unterstützt die fortschreitende Automatisierung in zahlreichen Branchen, darunter auch in der Lebensmittelindustrie. Aufgrund ihres geringen Gewichts, ihrer Geschicklichkeit und ihrer Robustheit stellen Weichkörperroboter auch eine vielversprechende Technologie für Raumfahrtanwendungen dar.[15]
Insgesamt bietet die Schnittstelle zwischen Robotik und Materialwissenschaft hervorragende Möglichkeiten für unterschiedlichste Technologiebereiche. Die Entwicklung intelligenter Materialien und fortschrittlicher Fertigungstechniken begünstigt eine neue Generation biologisch inspirierter, nachhaltiger Roboter mit weichen Körpern.
-
Yang G-Z, Bellingham J, Dupont PE, Fischer P, Floridi L, Full R, et al. The grand challenges of Science Robotics [Internet]. Vol. 3, Sci. Robot. 2018. Available from: http://robotics.sciencemag.org/
-
Fu C, Xia Z, Hurren C, Nilghaz A, Wang X. Textiles in soft robots: Current progress and future trends. Vol. 196, Biosensors and Bioelectronics. Elsevier Ltd; 2022.
-
Mazzolai B, Mondini A, Del Dottore E, Margheri L, Carpi F, Suzumori K, et al. Roadmap on soft robotics: multifunctionality, adaptability and growth without borders. Multifunct Mater. 2022 Sep 1;5(3).
-
Lan X, Zhao X. Application of carbon fiber composite materials in the field of industrial robots. In: ACM International Conference Proceeding Series. Association for Computing Machinery; 2019. p. 310–5.
-
Gariya N, Kumar P. A review on soft materials utilized for the manufacturing of soft robots. In: Materials Today: Proceedings. Elsevier Ltd; 2021. p. 11177–81.
-
Hartmann F, Baumgartner M, Kaltenbrunner M. Becoming Sustainable, The New Frontier in Soft Robotics. Vol. 33, Advanced Materials. John Wiley and Sons Inc; 2021.
-
Wehner M, Truby RL, Fitzgerald DJ, Mosadegh B, Whitesides GM, Lewis JA, et al. An integrated design and fabrication strategy for entirely soft, autonomous robots. Nature. 2016;536(7617):451–5.
-
Bar-Cohen Y, Anderson IA. Electroactive polymer (EAP) actuators—background review. Mech Soft Mater. 2019 Dec;1(1).
-
Schmitt F, Piccin O, Barbé L, Bayle B. Soft robots manufacturing: A review. Vol. 5, Frontiers Robotics AI. Frontiers Media S.A.; 2018.
-
Sydney Gladman A, Matsumoto EA, Nuzzo RG, Mahadevan L, Lewis JA. Biomimetic 4D printing. Nat Mater. 2016;15(4):413–8.
-
Rossiter J, Winfield J, Ieropoulos I. Here today, gone tomorrow: biodegradable soft robots. In: Electroactive Polymer Actuators and Devices (EAPAD) 2016. SPIE; 2016. p. 97981S.
-
Terryn S, Langenbach J, Roels E, Brancart J, Bakkali-Hassani C, Poutrel QA, et al. A review on self-healing polymers for soft robotics. Vol. 47, Materials Today. Elsevier B.V.; 2021. p. 187–205.
-
Soft Robotics Market - Growth, Trends, Covid-19 Impact, and Forecasts (2022-2027) [Internet]. Available from: https://www.mordorintelligence. com/industry-reports/soft-robotics -market
-
Gu G, Zhang N, Xu H, Lin S, Yu Y, Chai G, et al. A soft neuroprosthetic hand providing simultaneous myoelectric control and tactile feedback. Nat Biomed Eng [Internet]. 2021; Available from: http://dx.doi.org/1 0.1038/s41551-021-00767-0
-
Zhang Y, Li P, Quan J, Li L, Zhang G, Zhou D. Progress, Challenges, and Prospects of Soft Robotics for Space Applications. Adv Intell Syst. 2022 June 30; 2200071.

Bericht zur Fertigungsrobotik
Ein Leitfaden für Techniker und Ingenieure zum Verständnis des aktuellen Stands der Technik, der Werkstoffe und der Zukunft der robotergestützten Fertigung.
eBook herunterladen







