





Robots extend human capabilities with greater precision, reduced fatigue and a higher tolerance for hazardous conditions.
Robotics is moving beyond fixed factory cells into uncontrolled environments shared with people. This shift is enabled by advances in robotics hardware, including motors, joints and sensors that create and control the movement engineers need to solve specific tasks.
Moving robots out of fixed factory cells and into environments shared with people increases the computational demands for perception, planning and control. Advances in software, including artificial intelligence (AI) and machine learning, support smarter robots, but the choice of computing platform is also critical to meet real‑time sensing and control requirements.
The first half of this chapter provides an overview of the core hardware requirements for most robotics projects, covering motors, joints and sensors. The second half examines embedded systems that enable current robotics applications and support advanced perceptual and control tasks.
Robotics Hardware Overview
Sensors
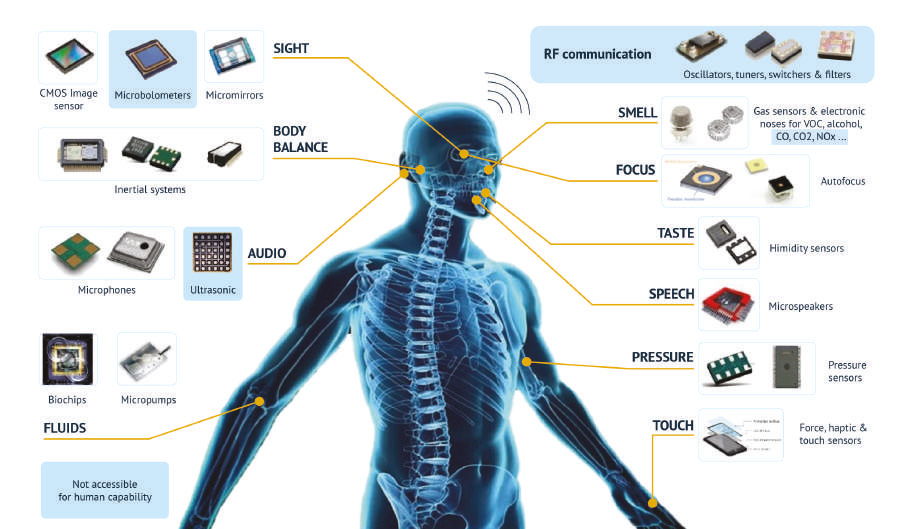
Sensors provide the robot with input from its surroundings, analogous to human senses such as sight, hearing, balance and touch.
Common robot sensors include:
- cameras for visual information
- microphones for sound
- force sensors to detect weight and resistance
- proximity sensors to locate nearby objects
- gyroscopes to determine orientation
- environmental sensors to measure temperature, humidity, gases and pollutants
Sensors are passive. They do not command the robot. Sensor data is typically sent to a central processing unit (CPU), where it is converted into actions.
A growing trend in robotics is the wider use of ultrasonic sensors. An ultrasonic sensor measures the distance to a target by emitting sound waves above the range of human hearing and converting the reflected signal into an electrical output.
An ultrasonic sensor has two main parts: a transmitter that emits the sound using piezoelectric crystals and a receiver that detects the reflected sound after it returns from the target.

Central Processing Unit
The CPU serves as the hardware and software interface between robot sensors and the control system. It parses commands for execution and routes them to specific components. In automated systems it processes sensor input, interprets data, performs calculations, and can run machine learning algorithms. In this role the CPU acts as the robot’s main processing unit and manages error handling when commands fail or unexpected events occur.
The CPU also provides error handling. When a command fails or an unexpected event occurs, the CPU determines how the robot should respond.
Error-handling examples include:
- Retrying the command
- Requesting manual control from the robot operator
- Recording the error as a data point for machine learning
- Disabling the robot
For semi-autonomous or manual robots, sensor input may be relayed to a human operator, and the operator’s commands are sent back through the CPU to the robot.
Some robots use a lightweight single-board computer (SBC) as middleware to pre-process sensor data and forward commands. The SBC collects sensor input and can relay it to an external CPU for further processing. The CPU returns high-level commands that the SBC parses and routes to the robot’s actuators and subsystems.
With the rise of artificial intelligence and edge computing, modern single-board computers increasingly include AI‑friendly hardware to improve efficiency and enable new applications. Edge computing lets data be processed and analysed at the network edge, providing faster real‑time insights and making SBCs well suited to IoT systems. SBCs also offer flexible platform configuration: systems can start with minimal requirements and be scaled to the application, a level of agility that purpose‑built PC systems do not provide.

Control System
The robot control system sends the commands that govern the robot’s actions, similar to the human nervous system that directs body movement. The control architecture varies depending on the robot’s level of autonomy.
- With fully autonomous robots, the control system often operates as a closed feedback loop. The CPU interprets sensor input, determines and executes the required action, and verifies whether the action was performed correctly.
- With manual robots, an operator controls the system using an external console. The CPU receives the operator’s commands and routes them to the robot’s actuators.
- With semi-autonomous robots, the control system combines autonomous and manual control. The level of autonomy determines whether the operator makes all high-level decisions or the robot requests operator input as needed.
Hardware for the robot control system varies with the environment, the tasks to be performed, and manufacturing constraints.
For example:
- A manual or semi-autonomous robot can be controlled using a personal computer, a purpose-built hand controller, a headset, foot pedals, voice commands via a microphone, or a textile-based controller such as a VR-style bodysuit.
- An autonomous robot can be controlled entirely by an onboard CPU or by software running on an external server.

Motors and Actuators
Motors and actuators provide robot mobility, analogous to human muscles and the cardiovascular system, and enable the robot to perform physical tasks. Without motors and actuators, a robot cannot move or interact with its environment.
Advances in motor design have produced smaller, more powerful units that are often housed in injection moulded casings. New permanent magnets deliver greater power from compact motors, while higher resolution encoders and improved motor tuning enhance accuracy and cycle time. These improvements support higher precision robotics applications and improve repeatability and throughput. Motors with better torque to weight ratios achieve higher peak speeds and faster acceleration and deceleration, and the reduced mass increases rigidity and lowers vibration.
Motors and actuators are related but serve different roles.
- A motor provides rotational motion and is typically used for continuous power. Examples include driving a robot across terrain, running an internal fan, or rotating a drill.
- Actuators produce linear or controlled movement for precise operations; examples include providing the bending motion of a robotic elbow or rotating a robot torso. Actuators are commonly electric, hydraulic or pneumatic.
Degrees of freedom (DOF) refers to the axes along which a mechanical joint can move. A joint's DOF is defined by its hardware, including the actuators that drive the motion.

End Effectors
End effectors, sometimes called end-of-arm tools or EOAT, are mechanical assemblies mounted at the end of a robot arm that enable the robot to manipulate objects.
They act as the robot’s hands, although their function and capabilities differ from those of human hands.
- Tool-specific end effectors can be highly specialised for robots that perform specific tasks. Examples include power tools such as drills or sanders, water pressure washers, powered vacuum suction cups, and specialised instruments for scientific research.
- Gripper-type end effectors are used to grasp and hold objects and are more general-purpose than tool attachments. Grippers take many forms, including actuator-driven clamps, electromagnetic systems, and passive features such as hooks or custom fasteners.
Some robots combine gripper and tool-specific end effectors. For example, a robot designed to weld pipes may carry a welding torch on one arm and a gripper on another to hold the pipe in place.
Interchangeable end effector systems let operators select the right tool for a task, from specialised power tools to general-purpose grippers. Some grippers can hold and operate tools, but they typically provide less precise control than purpose-built end effectors.
Soft robotics extends end effector capability by replacing rigid components with flexible, compliant materials. This approach improves a robot’s ability to handle fragile or deformable objects and reduces safety risks in workspaces shared with people. Minimizing hard surfaces also aids integration where gentle contact or adaptable gripping is required.

Connectors
Connectors relay commands and power throughout a robot. Motors, actuators, sensors and end effectors require both data buses and electrical circuits to operate.
Types of connectors used in robotics include:
- Circular connectors, push-pull connectors, and micro‑D connectors. These robust connectors carry both data and power and are designed for hand connection and disconnection while preventing accidental release. Circular connectors are compact, making them well suited for moving parts at end effectors and robotic joints.
- Data networking connectors carry data signals and typically provide faster, more reliable connections than multipurpose connectors. RJ45 connectors are Ethernet interfaces available in a range of flexible industrial shells suited to robotics applications.
- Wireless data connectors are essential for mobile robots that transmit sensor data and receive commands over Wi‑Fi or radio. They are also used with stationary industrial robots connected to a central server.
Today, a wide range of connectors is used in robotics. Industrial connectors come in housings rated for harsh environments and are flexible enough to accommodate joint and end effector movement. Connector choice influences assembly and routing at end effectors and joints and affects data transfer speed and reliability across the robot.

Powering the Robot
The power supply is a major manufacturing consideration, especially for mobile robots. Stationary robots typically connect to an industrial power source. Mobile robots are usually powered by rechargeable lithium ion batteries. Battery design may need to be customised based on robot wattage, runtime requirements, weight limits, available charging infrastructure, and environmental conditions such as temperature and humidity.
One consideration for battery-operated robots is the power source used to charge the battery. It may be necessary to design a specialized battery charger that accounts for the battery’s power requirements, source limitations, and environmental conditions. The charger can be integrated on the robot or provided as standalone equipment.
Some power sources include:
- Standard industrial power from the municipal grid. For mobile robots, that power typically feeds a standalone battery charger rather than powering the robot directly.
- Solar panels can be fitted to the robot or mounted at a separate charging station. Onboard panels provide backup power for remote operation.
- Portable power generators, often fuelled by petrol, propane, or biodiesel, provide on-site power when grid or solar sources are unavailable. Advances in generator design have improved portability and fuel efficiency and expanded acceptable fuel options.
Battery hot swapping is another design consideration for battery-operated robots. Robots with hot-swapping capability use multiple batteries so an exhausted battery can be replaced while the robot remains operational. The removed battery is then recharged for later use.
Robotics Hardware Challenges
Resource Shortages
Global shortages of semiconductors and commercial off-the-shelf hardware are impacting robotics manufacturing. [11] These supply constraints are outside a manufacturer's control and can force design compromises, raise costs, extend lead times, and make project schedules and forecasts less reliable.
Environmental Conditions
The robot operating environment affects every hardware choice. Robots may work in hazardous areas, be exposed to weather, dust, pressure, or be submerged in water. IP ratings and chemical compatibility therefore limit which components can be used. Custom housings and chassis can mitigate some constraints but often introduce additional manufacturing challenges. Software can also reduce hardware exposure by enabling the robot to detect and navigate hazardous environments.
Increasing Computational Power
As robotic applications move from controlled to uncontrolled environments, computational demands rise. Computing platforms that provide fast, efficient processing for complex perception and control tasks will be essential.
Key Advances
Open Research and Development Platforms
Open platforms for research and development that cover hardware, software, computing platforms and simulation are widely supported in academia. These platforms make it easier to compare and benchmark methods and allow researchers to focus on algorithm development.
Standardisation is necessary to accelerate sector progress by enabling efficient exchange and integration of algorithms, hardware and software components.
Computational Solutions Inspired by Insect Brains
Uncrewed aerial vehicles (UAVs) are highly resource constrained because they must be fast, light and energy efficient. Some computational approaches for UAVs are inspired by insect brains and address tasks such as obstacle avoidance, object targeting, altitude control and landing. These solutions draw on insect embodiment, tight sensorimotor coordination, swarming behaviour and parsimony. In UAV systems, the concepts are implemented as compact algorithms and multi purpose circuits.
An important insight from these approaches is that close integration of algorithms and hardware produces compact, powerful, and efficient systems. Hardware platforms from microcontrollers to neuromorphic chips can support these bio-inspired algorithms. Engineers should pay particular attention to the interface between computing and motion hardware to ensure reliable performance. [12]
Neuromorphic Computing Hardware
Neuromorphic computing models computer elements on the human brain and nervous system. It uses specialized architectures that mirror neural network structure from the ground up. Dedicated processing units emulate neuron behaviour in hardware, and dense physical interconnections enable rapid information exchange.
Neuromorphic computing hardware is expected to join other platforms such as the CPU, GPU, and FPGA. These systems are promising for robotics because they are modular and flexible. They provide a high degree of parallelism and an event driven implementation that allows multiple computations to run quickly and simultaneously. Neuromorphic designs combine processing and memory to enable learning in hardware, unlike traditional systems that separate these functions. This learning is supported by algorithms based on synaptic plasticity and neural adaptation. [13]
Artificial Skin: Combining Sensors with Materials
An emerging area of robotics is artificial skin, or smart skin, which integrates sensor hardware with the robot form. While this research has multiple applications, early work focuses on smart skin that enables closer robot human interaction by sensing unexpected physical contact. There is also opportunity to integrate computing fabric directly into the sensor. [13]
Summary
Robots extend human capabilities across many industrial and commercial applications. Hardware requirements depend on the tasks the robot will perform. Key robot components include sensors, the central processing unit, motors and actuators, end effectors, and connectors. Each component introduces specific design and manufacturing considerations, and the combined system-level interactions must be addressed when sourcing or outsourcing robotic hardware.
Beyond the robot’s moving parts, other factors create hardware challenges for manufacturers. Resource shortages can force design changes and delay production, while environmental conditions restrict the materials and components that can be used and may require software workarounds.
Recent innovations in robotics include greater computational power, improved software, and biomimetic developments such as insect-inspired algorithms, smart skin, and neuromorphic computing. These advances extend robot capabilities and drive progress in robotics hardware.
-
Gabriel Aguiar Nour, State of the Art Robotics, Ubuntu Blog, May and June 2022 edition
-
Sven Parusel, Sami Haddadin, Alin Albu-Schaffer, Modular state-based behaviour control for safe human-robot interaction: A lightweight control architecture for a lightweight robot, IEEE International Conference on Robotics and Automation, 2011.
-
Mathanraj Sharma, Introduction to Robotic Control Systems, Medium Newsletter, Sept 2020.
-
Ravi Teja, Blog on Raspberry Pi vs Arduino, www.electronicshub.org, April 2021.
-
Mats Tage Axelsson, Top 5 Advanced Robotics Kits, www.linuxhint.com, September 2022.
-
Techopedia contributor, Actuator, www.techopedia.com, Jan 2022.
-
Tiffany Yeung, What Is Edge AI and How Does It Work?, https://blogs.nvidia.com/blog/ 2022/02/17/what-is-edge-ai/, Feb 2022.
-
NT Desk, The state has the potential to grow as an electronic manufacturing centre, www.navhindtimes.in, Oct 2019.
-
Dr Matthew Dyson, Printed Electronics: Emerging Applications Accelerate Towards Adoption, IDTechEx, Nov 2021.
-
Advanced network professionals blog, www.getanp.com/blog/35/hardwa re-your-business-needs-to-succee d.php, Dec 2019.
-
Advanced Mobile Group, The Latest Technology and Supply Chain Trends in Robotics for 2022 and Beyond. https://www.advancedmobilegrou p.com/blog/the-latest-technology -and-supply-chain-trends-in-robot ics-for-2022-and-beyond, Oct 2022.
-
Moncourtois, Alyce. Can Insects Provide the "Know-How" for Advanced Artificial Intelligence? AeroVironment https://www.avinc.com/resources/av-in-the-news/view/microbrain-case-study 2019.
-
Yirka, Bob. Biomimetic elastomeric robot skin has tactile sensing abilities. Tech Xplore. https://techxplore.com/news/2022-06-biomimetic-elastomeric-robot-skin-tactile.html June 2022.
Manufacturing Robotics Report
|
An Engineer’s guide to understanding the state of the art in hardware, materials, and the future of robotics manufacturing. |
 |
Start Your Next Robotics Project Today
|



