



Building a Bimodal Quadruped Robot with a Manufacturing Hand from Protolabs’ Cool Idea Award

One of the last checkboxes Worcester Polytechnic Institute (WPI) engineering students must tick before they conclude their collegiate careers is to submit capstone projects. Janie Leung and four other peers opted to build upon a project from a previous year: optimizing a four-legged robot to switch between traversing on two legs or four legs based on the task need.
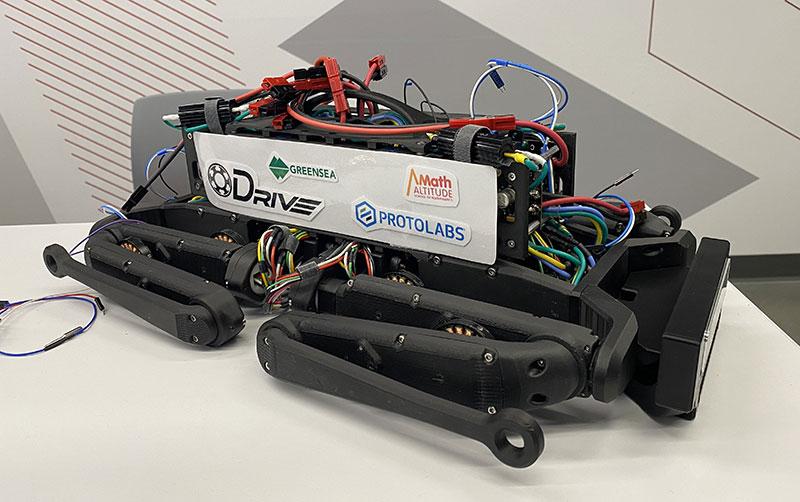
The final BiQu robot with a list of its sponsors, including Protolabs.
Bipedal vs. Quadrupedal
According to Leung, a quadruped (four-legged) dog-like robot works well for traversing uneven terrain due to enhanced stability—a four-legs-are-better-than-two situation. In contrast, a bipedal robot can stand on two legs with wheels on the bottom, allowing for better mobility for tasks like reaching something on a tall shelf, handling objects, or navigating within narrow spaces. Leung’s group project combined the best of both worlds optimizing the bot to be able to switch between two legs or four.
“With a humanoid robot, you can have more flexibility in going into tight spaces. They can have hands to manipulate items. But a robot dog, they can traverse on different types of terrain because they have four legs, so it’s more stable. So, our idea is that if our robot could switch between the two, you would have a lot more possibilities,” explained Leung.
From Quad to BiQu and Back Again
Over the last several years, there’s been an uptick in robots involved in workforce automation across diverse industries, like manufacturing, automotive, construction, and medical. Not necessarily solely bots replacing human jobs, but a combination of people and robots working alongside in tandem. Leung and her team noticed that you often see either a two-legged or a four-legged robot in different environments to complete very specific tasks. But what would happen if a bot was programmed to switch between two or four legs, based on varying task needs? Enter the improved BiQu robot.
What sort of upgrades did the previous strictly four-legged bot get? “We took that design and focused on upgrading the hardware, implementing some dynamic control, and adding a vision system. It can receive information from the environment with just the vision piece and walk reactively. Initially, it was only walking straight, but this year we added more hip joints so that it can rotate and balance,” she said.
The WPI team performing a leg test on the BiQu robot.
Printing Transmission Pulleys
The BiQu bot contains 12 different actuator modules, each with a transmission system, requiring a pulley activated by a motor. When it came to researching different 3D printing technologies and materials for the pulleys, the team worked through some trial and error.
“The transmission pulley requires very high precision for the tooth profile and high strength because it’s going to be driven by a belt, so you don’t really want it to deform over time. We tried to go with very basic PLA, but when we printed with it there were a lot of very visible layers,” explained Leung.
The Protolabs Cool Idea Award manufacturing grant provided funding for the team to 3D print the pulleys with Stereolithography (SLA) using ABS-Like White (Accura Xtreme White 200). “We were fortunate to have received the manufacturing grant for this project,” said Leung.
The team used an open-source design for the robot, but customized it using more cost-effective hardware, rebuilding the chassis to accommodate all the new hardware, and creating their own master board and mounting components on the bot.
Leung’s favorite part of the project was combining the skills acquired during her college career, including computer electronics, engineering, and designing for manufacturing. “It was a cool realization that I actually learned a lot throughout my college career,” she said. Now that Leung has graduated from WPI, she’s looking forward to starting a new job as an automation engineer.
Learn more about our Cool Idea Award. We’re always looking to lend a manufacturing hand to support innovative new products!

If you have any issues getting your guide, click here to download.





Need custom 3D-printed parts? Upload your CAD file for an instant online quote.
Get Printed Parts